
Pint of Science is an informal way to find out more about an array of weird and fascinating facts. Spanning 37 UK locations, and a handful of international ones, it runs for a few days in May every year. On Wednesday 24 May 2023 I went to the gathering (in the Student Union bar) at Queen Mary University London to learn more about robots!
https://pintofscience.co.uk/event/engineering-the-future
Apparently “soft robotics” has been around since about 2018 although this was the first time I had heard of it. I had a fascination with robots when I was much younger, bought an original Aibo mark 1 in 2006, but have never been any good at making my own robots.
Today, the big question is “how do robot hands know how much grip to apply when picking up hard or soft objects”? And because they lack eyes, experience and human sentience, how do they carry out delicate and proportionate touch? The answer is cilia, lots of cleverly constructed cilia containing micro magnets.
Cilia are the fine hairs on the outside of microscopic organisms.
Scale them up a bit and they look like the gentlest, softest pine needles at the extremities of your Christmas tree.
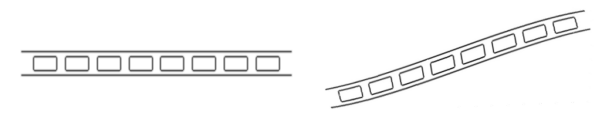
Make some miniature ones out of silicone, embed some magnets inside them, and in effect you have what looks like a row of railway carriage windows in a soft bendy tube.
Why magnets? Magnets have magnetic fields, and when magnets move they create electrical impulses. That’s how dynamos work, and if you reverse the system that’s how electric motors work.

Tiny magnets in soft bendy silicone tubes create tiny magnetic fields which can move about and create variations in their tiny electrical impulses. Now, all you need to do is to place an electrical impulse sensor near the soft bendy silicone tubes. Not inside them! That’s the crucial bit, these artificial cilia are independent of the electrical bits around them, they can operate freely, and they “sense” in a similar way to the tips of your fingers.
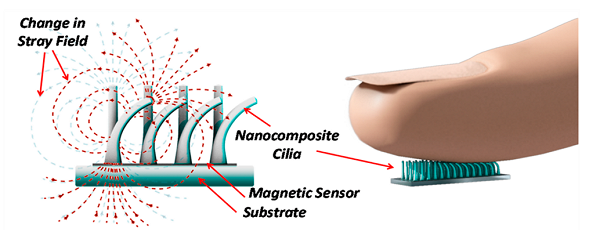
The slightest touch of the cilia creates a magnetic distortion, and the level and speed of the distortion tells the robot gripper how hard or soft the object is. That in turn allows the software to calculate how much grip is to be applied, and that message is passed back to the motors which control the movement of the robot gripper.
Fascinating! How did I not know this sooner?
Maybe Pint of Science has rekindled my interest in robotics!